ROS Teleop Groovy
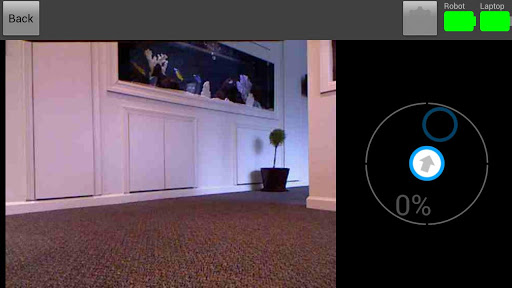
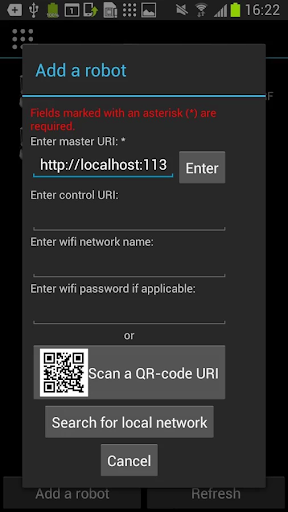
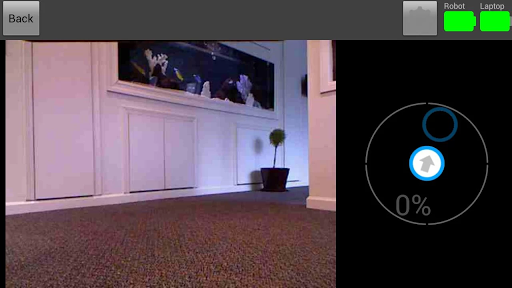
Teleoperate ROS-enabled robots using your android device.Wiki available here:http://www.ros.org/wiki/android_teleopSource code:https://bitbucket.org/o...
Teleoperate ROS-enabled robots using your android device.Wiki available here:http://www.ros.org/wiki/android_teleopSource code:https://bitbucket.org/o...
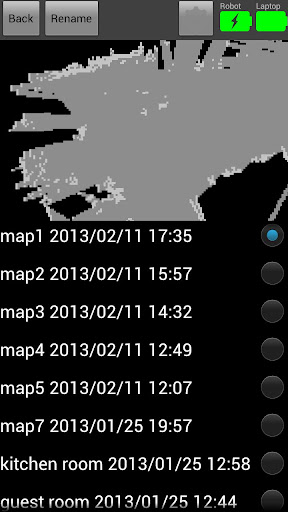
View, remove and rename maps on your ROS-enabled robot.View: Choosing a radio button.Remove: Flicking an item of the list.Rename: Pushing the rename b...
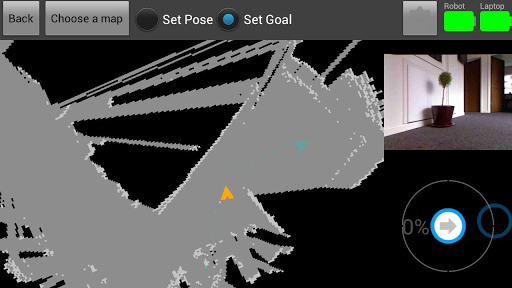
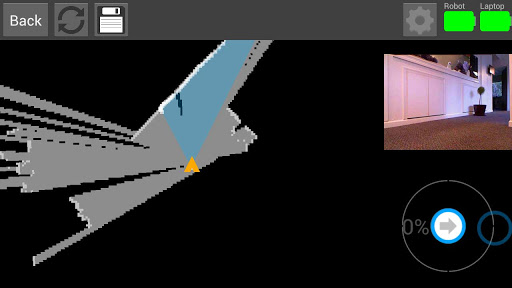
Use a map to navigate with your ROS-enabled robot.There are 2 basic operations: - Set Pose: allows you to change the estimated pose of the robot. - Se...
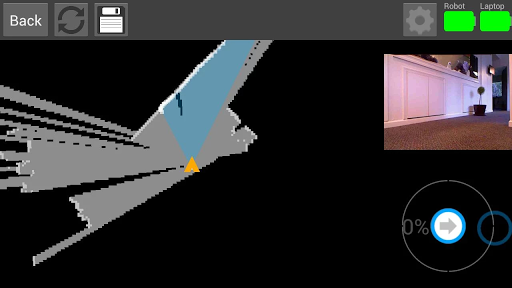
Make maps with your ROS-enabled robot.Wiki available here:http://www.ros.org/wiki/android_make_a_mapSource code:https://github.com/rosjava/android_app...
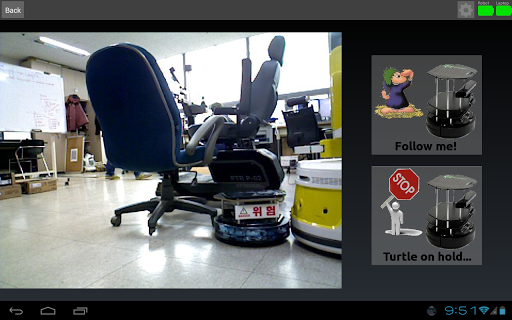
Follower algorithm for TurtleBot. Follows humans and robots around by moving toward the centroid of a 3D pointcloud inside a box in front of the robot...
The listener tutorial is the ROS equivalent of 'Hello World!' with publishers and subscribers. This android application is half of the combina...
Make maps with your ROS-enabled robot.Wiki available here:http://www.ros.org/wiki/android_make_a_mapSource code:https://bitbucket.org/osrf/rosandroid/...
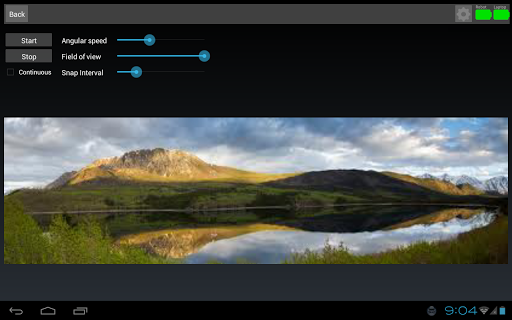
Make your TurtleBot take snapshots while rotating and and stitching them together to create panorama pictures.免費玩Turtlebot Panorama (Hydro) APP玩免費免費玩T...
The robot remocon is an android application to interface with ROS robots in pairing mode. When the remocon starts, you can initiate connections with R...
Teleoperate ROS-enabled robots using your android device.Wiki available here:http://www.ros.org/wiki/android_teleopSource code:https://github.com/rosj...