Display real time sensor data
This is a development tool to display sensor data in real time. It is helpful, if you want to develop application using sensor data.免費玩Display real ti...
This is a development tool to display sensor data in real time. It is helpful, if you want to develop application using sensor data.免費玩Display real ti...
Diese App demonstriert die Leistungsfähigkeit von verschiedenen Sensoren und Sensorfusionen.Messungen von dem Gyroskop, Akzelerometer und Kompass werd...
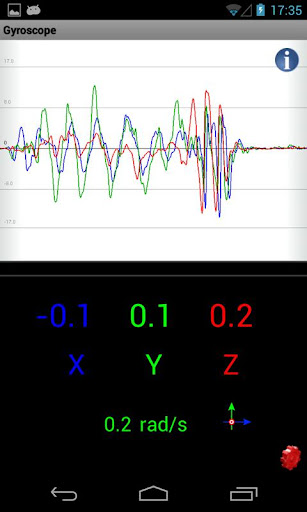
A simple tool for developers and technicians that displays the raw (numerical) data from the Accelerometer, Orientation Sensor, and Location Sensor (G...
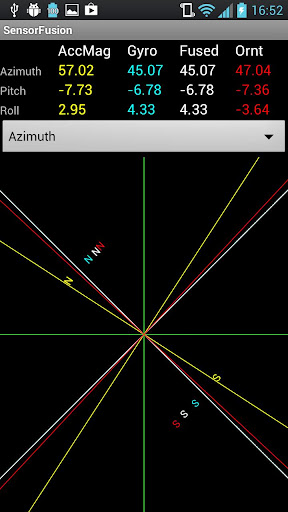
Sensor Fusion as provided by Paul Lawitzki at thousand-thoughts.com but with some visual additions by me.Fuse accelerometer, magnetometer and gyroscop...
This sensor fusion app is intended as an illustration of whatsensor capabilities your smartphone or tablet have.You can watch graphs of the main senso...

Sensor Fusion is a process by which data from several different sensors are "fused" to compute something more than could be determined by any one sens...

Sensor Data Logger allows you to:-Watch real-time data from two sensors: Accelerometer, Magnetometer (compas, magnetic field).-Watch GPS data: latitud...
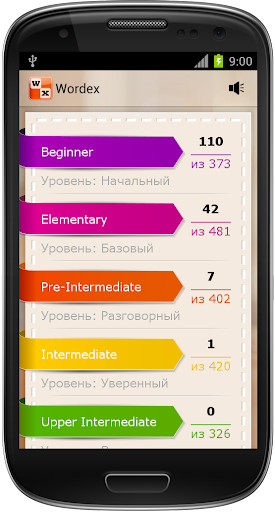
Wordex - application for English language learning. Every day you will study new words and improve your vocabulary.Wordex features:-------------------...
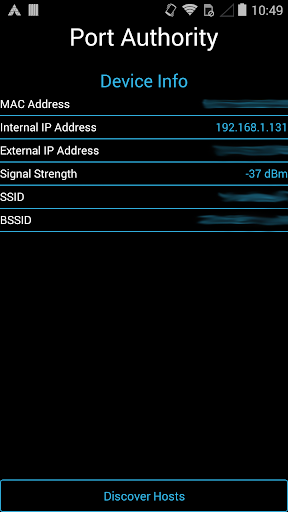
This is the donate version of the free Port Authority app. It is exactly the same as the free version except for the extra support from you :)A handy ...
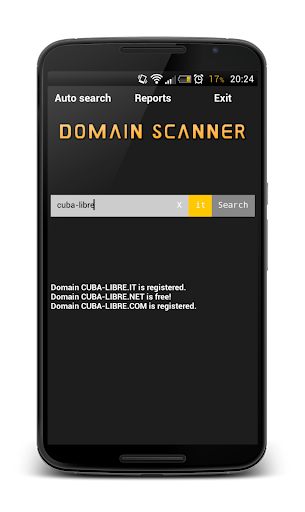
Auto search domains with many extensions. App is giving you big advantige of choosing from free domain names. Simply copy an unlimited range of text /...