
Convert coordinate Camera
Convert coordinate system.This converts latitude/longitude to TM coordinate system and reverse tooUsing camera, you can represent date and TM coordina...
Convert coordinate system.This converts latitude/longitude to TM coordinate system and reverse tooUsing camera, you can represent date and TM coordina...
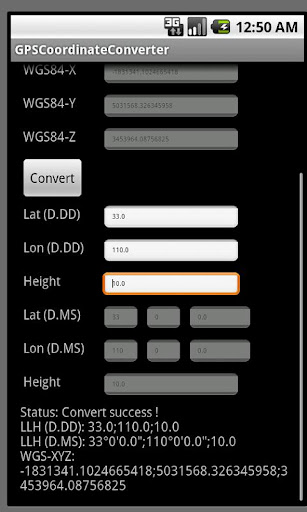
Need an engineering app to convert GPS WGS-XYZ coordinates to geographic one with latitude, longitude and height?This will be the ultimate App for you...
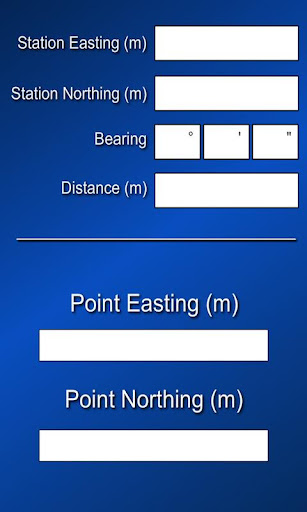
A handy calculator to determine the new coordinates of a point using a known distance and bearing. Something that is used on a daily basis by site set...
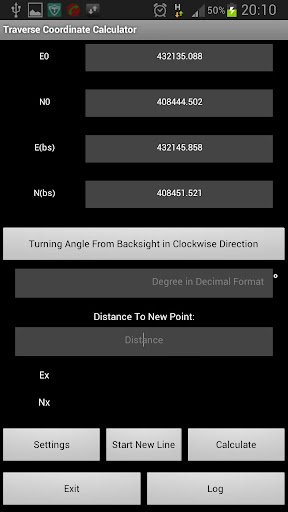
Calculate coordinates (E,N) for points along traverse line.How to use:- input coordinates (Ebs,Nbs) for Backsight point- input coordinates (E0,N0) for...
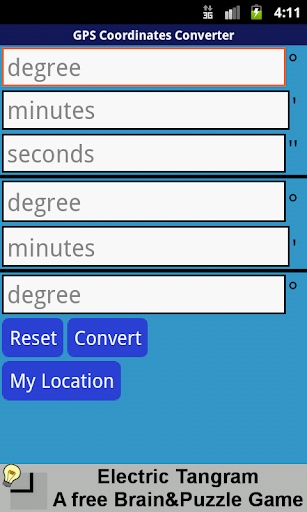
In this app you can convert GPS coordinates from "degrees, minutes, decimal seconds" to "degrees, decimal minutes" and "decimal degrees".(And the othe...

Il programma iConv, nella versione gratuita, ti aiuterà nella conversione delle coordinate nei sistemi Gauss Boaga, Cassini Soldner e Latitudine Longi...

iConv can convert coordinates from/to Gauss Boaga, Cassini, UTM and latitude/longitude.It also maintains a transformations report who contains all the...
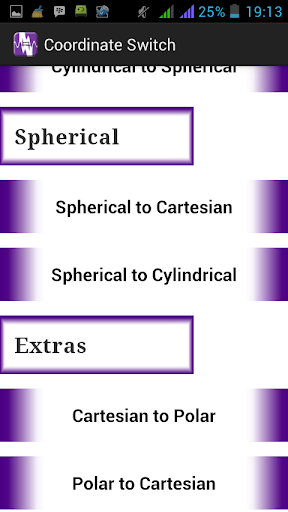
Coordinate Switch carries out the following switch operations:Cartesian to CylindricalCartesian to SphericalCylindrical to CartesianCylindrical to Sph...
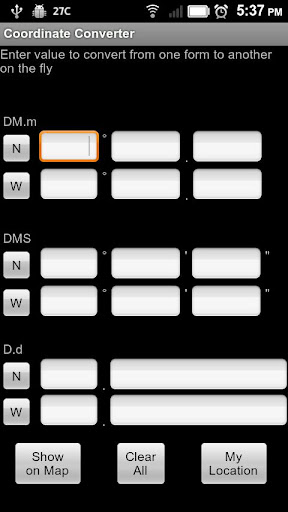
This is a simple application that will convert Latitude/Longitudes between these formats: D.d, DM.m, and DMS. There is also a location feature to grab...
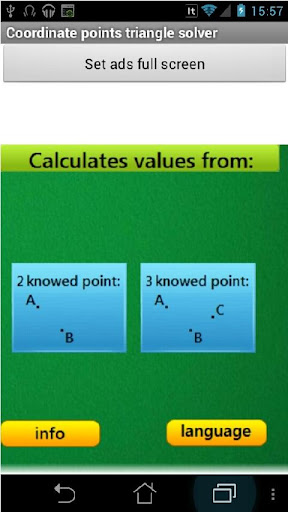
Coordinate points triangle solver is an user-friendly app that allows you to calculate a lot of values starting from just 2 or 3 couple of coordinates...