Android implementation of Notch's DCPU-16 (v1.1 and v1.7) (http://0x10c.com)
Version 0.33
By Andrew "Stick" Boothroyd (@sticksoft)
Latest stable version: https://play.google.com/store/apps/details?id=uk.co.sticksoft.adce
Don't forget you can post issues / feature requests on GitHub :)
LICENSE
=======
You may do whatever you want with this software, at your own risk. (http://en.wikipedia.org/wiki/WTFPL)
If you use it in a project, letting me know and putting a link to https://github.com/sticksoft/ADCPU-16Emu in would be appreciated.
If I ever meet you in person, a beer would be even more appreciated!
README
======
Overview
--------
This version assembles and runs DCPU 1.1 and 1.7 programs.
Supported features include emulator, assembler, RAM viewer, minimal debugger, some hardware, and virtual ship (2D).
Hardware includes LEM1802, Generic Keyboard, Generic Timer, and M35FD.
Usage
-----
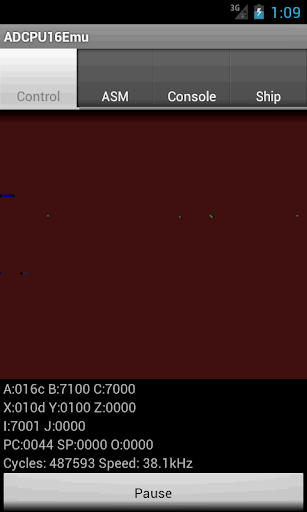
The first tab shown on app startup is the Control tab, containing the RAM viewer (box at the top) and controls for starting / resetting the emulator.
This won't do much until you assemble a program!
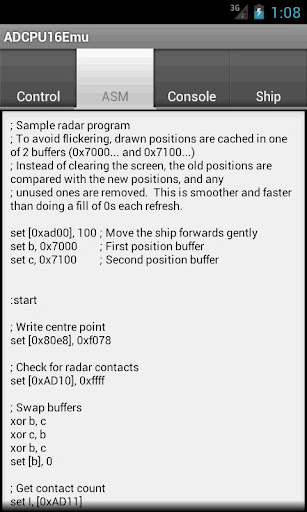
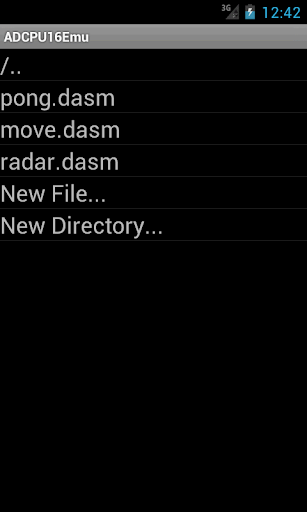
The ASM tab is the Assembly view. Here, you can load / save an assembly file from disk (press the Menu key for options) and assemble a program.
Pressing "Assemble" will reset the emulator, assemble your program, output the assembled binary and an assembly -> binary view for debugging, and load the binary data into the emulator's memory.
Return to the first tab to start it and view changes to the memory.
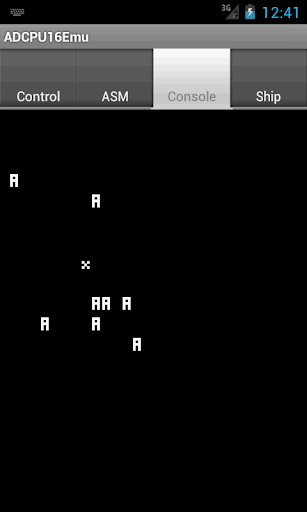
The Console tab displays the text console. With the app in its default (DCPU 1.7) mode, this is the LEM1802.

In this screen, phone-keyboard input is routed to the Generic Keyboard device.
The Ship tab displays a virtual ship! Control it by writing to 0xAD00 (throttle) and 0xAD02 (yaw starboard / port); sample code is included that does this (move.dasm).
Values for these registers are interpreted as signed 2's complement integers; e.g. 0x7FFF = all ahead full, 0x8000 = full reverse, 0x0000 = all stop.
For current rotation speed, read from 0xAD05 - positive (< 0x8000) values are clockwise (starboard) and negative values are anticlockwise.
Harcoded memory addresses
-------------------------
These will be replaced with a hardware device soon.
0xAD00 - Throttle control
0xAD01 - (reserved for pitch)
0xAD02 - Yaw
0xAD03 - (reserved for roll)
0xAD04 - (reserved for pitch gyro)
0xAD05 - Yaw gyro
0xAD06 - (reserved for roll gyro)
0xAD10 - Radar control. Set to 0xFFFF to get count, set to index number (starting at 1) for that contact's info.
0xAD11 - Radar contact count
0xAD12 - Current contact X
0xAD13 - (reserved for contact Y)
0xAD14 - Current contact Z
0xAD15 - (reserved for contact type)
0xAD16 - (reserved for contact size)
0xAD17 - (reserved for contact IFF code)
Upcoming features
-----------------
Resuming previous CPU state
Visual editor supporting comments
Debugging from the visual editor
免費玩ADCPU APP玩免費
免費玩ADCPU App
ADCPU APP LOGO
ADCPU APP QRCode
| 熱門國家 | 系統支援 | 版本 | 費用 | APP評分 | 上架日期 | 更新日期 |
|---|---|---|---|---|---|---|
| 未知 | Android Google Play | 0.33 App下載 | 免費 | 1970-01-01 | 2015-04-20 |





