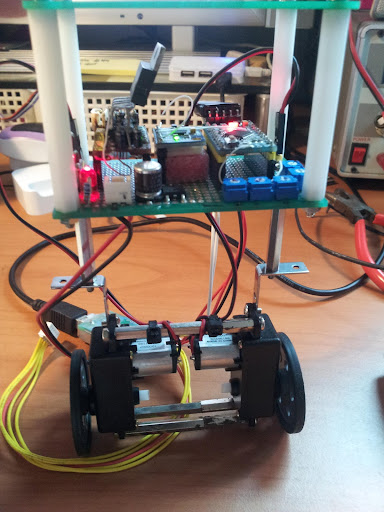
[Remote] 2-Wheel Self Ballancing Robot
MPU6050의 데이터를 칼만필터를 활용하여 받은 값으로 제어합니다.
아직 버그들이 많습니다.
PID gain 값 설정할 때만 사용하세요.
----

개발자 연락처 :

깡통로봇 연구소 소장님
위기에 처하지 않은 지구를 지키기 위해 매우 노력중


免費玩밸런싱 로봇 세팅 및 조종기 APP玩免費
免費玩밸런싱 로봇 세팅 및 조종기 App
밸런싱 로봇 세팅 및 조종기 APP LOGO

밸런싱 로봇 세팅 및 조종기 APP QRCode
| 熱門國家 | 系統支援 | 版本 | 費用 | APP評分 | 上架日期 | 更新日期 |
|---|---|---|---|---|---|---|
| 未知 | Android Google Play | 1.0 App下載 | 免費 | 1970-01-01 | 2015-04-21 |